6.7 KiB
AMaze
🧭 Partially-observable navigation in procedural mazes.
The AMaze environment reproduces the MiniGrid-based, partially-observable maze navigation environments featured in previous works. Specifically AMaze provides feature-parity with respect to the previous reference implementation of the maze environment in facebookresearch/dcd.
Student environment
View source: envs/maze/maze.py
Static EnvParams
The table below summarizes the configurable static environment parameters of AMaze. The parameters that can be provided via minimax.train by default are denoted in the table below. Their corresponding command-line argument is the name of the parameter, preceded by the prefix maze, e.g. maze_n_walls for specifying n_walls.
Similarly, evaluation parameters can be specified via the prefix maze_eval, e.g. maze_eval_see_agent for specifying see_agent. Currently, minimax.train only accepts maze_eval_see_agent and maze_eval_normalize_obs.
Note that AMaze treats height and width as parameterizing only the portion of the maze grid that can vary, and thus excludes the 1-tile wall border surrounding each maze instance. Thus, a 15x15 maze in the prior MiniGrid-based implementation corresponds to an AMaze parameterization with height=13 and width=13.
| Parameter | Description | Command-line support |
|---|---|---|
height |
Height of maze | ✅ |
width |
Width of maze | ✅ |
n_walls |
Number of walls to place per maze | ✅ |
agent_view_size |
Size of foward-facing partial observation see by agent | ✅ |
replace_wall_pos |
Wall positions are sampled with replacement if True |
✅ |
see_agent |
Agent sees itself in its partial observation if True |
✅ |
normalize_obs |
Scale observation values to [0,1] if True |
✅ |
sample_n_walls |
Sample # walls placed between [0, n_walls] if True |
✅ |
obs_agent_pos |
Include agent_pos in the partial observation |
✅ |
max_episode_steps |
Maximum # steps per episode | ✅ |
singleton_seed |
Fix the random seed to this value, making the environment a singleton |
State space
| Variable | Description |
|---|---|
agent_pos |
Agent's (x,y) position |
agent_dir |
Agent's orientation vector |
agent_dir_idx |
Agent's orientation enum |
goal_pos |
Goal (x,y) position |
wall_map |
H x W bool tensor, True in wall positions |
maze_map |
Full maze map with all objects for rendering |
time |
Time step |
terminal |
True iff episode is done |
Observation space
| Variable | Description |
|---|---|
image |
Partial observation seen by agent |
agent_dir |
Agent's orientation enum |
agent_pos |
Agent's (x,y) position (not included by default) |
Action space
| Action index | Description |
|---|---|
0 |
Left |
1 |
Right |
2 |
Foward |
3 |
Pick up |
4 |
Drop |
5 |
Toggle |
6 |
Done |
Note that the navigation environments only use actions 0 through 2, however all actions are included for parity with the original MiniGrid-based environments.
Teacher environment
View source: envs/maze/maze_ued.py
To support autocurricula generated by a co-adapting teacher policy (e.g. PAIRED), AMaze includes UEDMaze, which implements the teacher's MDP for designing Maze instances. By design, a pair of Maze and UEDMaze objects (corresponding to a specific setting of EnvParams) can be wrapped into a UEDEnvironment object for use in a training runner (see PAIREDRunner for an example).
The parameters that can be provided via minimax.train by default are denoted in the table below. Their corresponding command-line argument is the name of the parameter, preceded by the prefix maze_ued, e.g. maze_ued_n_walls for specifying n_walls. Note that when the corresponding maze_* and maze_ued_* arguments conflict, those specified in maze_* take precedent.
Static EnvParams
| Variable | Description | Command-line support |
|---|---|---|
height |
Height of maze | ✅ |
width |
Width of maze | ✅ |
n_walls |
Wall budget | ✅ |
noise_dim |
Size of noise vector in the observation | ✅ |
replace_wall_pos |
If True, placing an object over an existing way replaces it. Otherwise, the object is placed in a random unused position. |
✅ |
fixed_n_wall_steps |
First n_walls actions are wall positions if True. Otherwise, the first action only determines the fraction of wall budget to use. |
✅ |
first_wall_pos_sets_budget |
First wall position also determines the fraction of wall budget to use (rather than using a separate first action to separately determine this fraction) | ✅ |
set_agent_dir |
If True, the action in an extra last time step determines the agent's initial orientation index |
✅ |
normalize_obs |
If True, Scale observation values to [0,1] |
✅ |
State space
| Variable | Description |
|---|---|
encoding |
A 1D vector encoding the running action sequence of the teacher |
time |
current time step |
terminal |
True if the episode is done |
Observation space
| Variable | Description |
|---|---|
image |
Full maze_map of the maze instance under construction |
time |
Time step |
noise |
A noise vector sampled from Uniform(0,1) |
Action space
The action space corresponds to integers in [0,height*width]. Each action corresponds to a selected wall location in the flattened maze grid, with the exception of the last two actions, which correspond to the goal position and the agent's starting position. This interpretation of the action sequence can change based on the specific configuration of EnvParams:
-
If
params.replace_wall_pos=True, the first action corresponds to the number of walls to place in the current episode. -
If
params.set_agent_dir=True, an additional step is appended to the episode, where the action corresponds to the agent's initial orientation index.
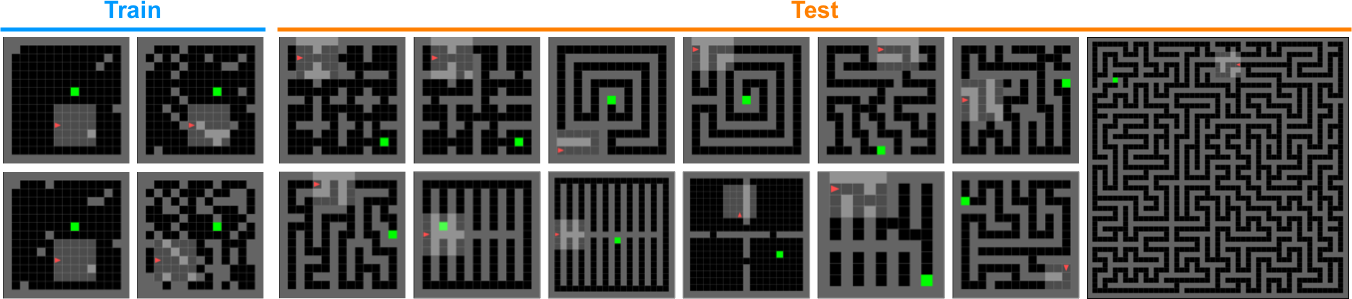
OOD test environments
The AMaze module includes the set of OOD, human-designed environments for testing zero-shot transfer from previous studies (See the figure above for a summary of these environments). Several of these environments are procedurally-generated:
Maze-SmallCorridorMaze-LargeCorridorMaze-FourRoomsMaze-CrossingMaze-PerfectMaze*
The OOD maze environments are defined in envs/maze/maze_ood.py. They each subclass Maze and support customization via the EnvParams configuration, e.g. changing the default height or width values to generate larger or smaller instances.